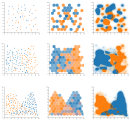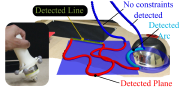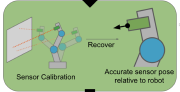
Novel Sensors for Robotics Applications: We are exploring how we can use emerging sensors in robotics applications. New sensors offer different tradeoffs and capabilities which provides opportunities for robotics usages. For example, we are working with Single Photon Avalanche Diode (SPAD) time of flight sensors which provide distance information in small, low-power packages. These sensors provide different information than more traditional ones: for example providing statistical distributions over an area, rather than detailed measurements.